Funded Projects
Autonomous Fruit Harvesting Robot - IIT project

• Developed an autonomous fruit harvesting robot using Deep Learning and Computer Vision.
• Implemented various state of the art algorithms for 6D pose estimation and Fruit detection and localization.
• Worked on simulating the robot in Gazebo and interfacing it with ROS.
Mars Rover Prototype

• An Inter disciplinary project aimed at building a fully functional prototype of the Mars rover.
• Headed the autonomous navigation team which focused on GPS based point to point autonomous navigation.
• The entire autonomous system was built by using ROS,openCV and python.
• The Intel RealSense camera was used for visual perception and the Nvidia Jetson TX2 was used for on board processing of data.
Self Driving Car - Mahindra & Mahindra

• Aimed at building a self driving car using a full scale Mahindra Reva electric vehicle.
• One of 12 teams selected for nationwide Mahindra Driverless Car Challenge.
• Implemented lane detection and Imitation learning with data augmentation
• Experimented various Deep Neural Network models for Traffic Sign Detection.
Select Independent and department Projects
Indoor Navigation of Robot for Household Works
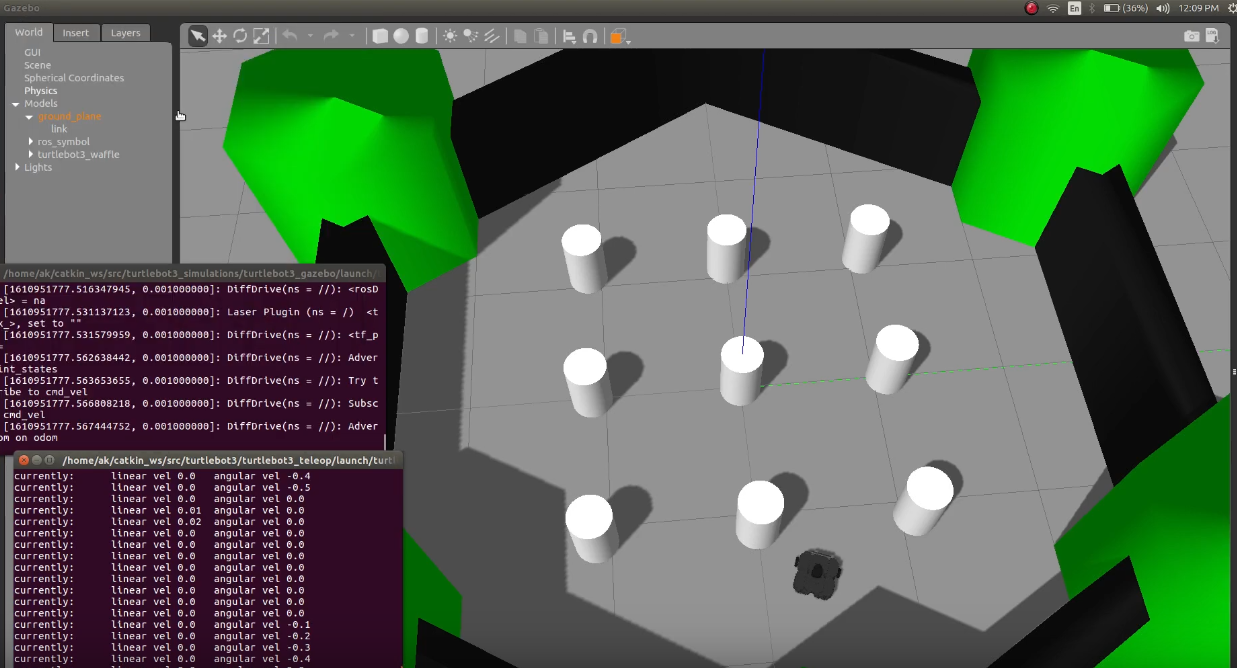
• Aimed at simulating an autonomous mobile robot which would be able to navigate through household environments.
• Simulated and spwaned the turtlebot model in Gazebo and interfaced it with ROS.
• Implemented SLAM using the navigation stack in ROS for obstacle avoidance.
A ROS Integrated Educational platform for teaching Mobile Robotics
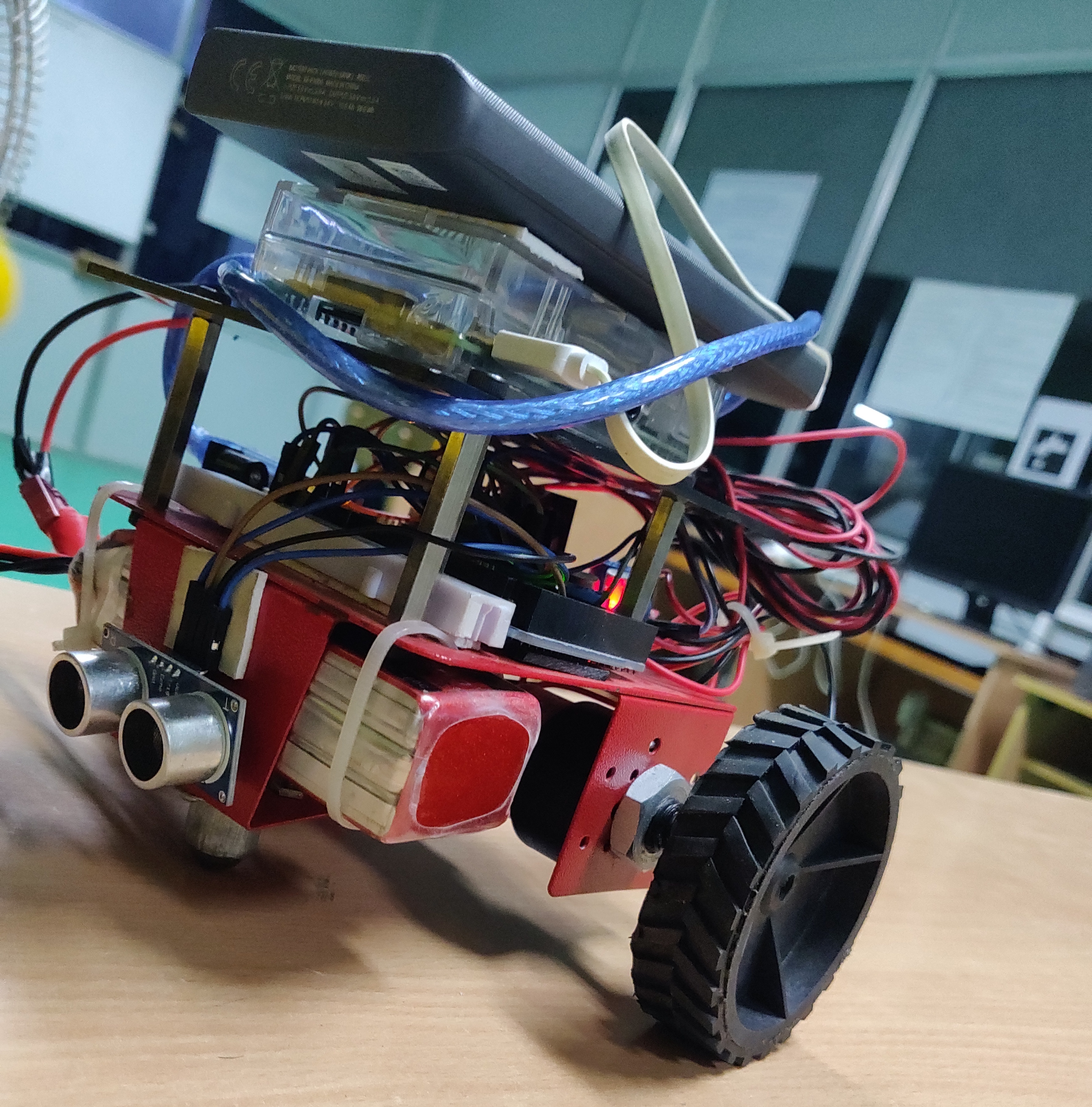
• Inspired by the Duckietown project to develop a low cost,ROS-integrated Mobile Platform to teach Mobile Robotics.
• Developed codebase for PID Control, Object Detection, Lane Detection etc.
AI based Tic Tac Toe Game
• Developed an AI based Tic Tac Toe game in which a hard coded agent attempts to block the user.
• Algorithm performed at a 99% accuracy in beating the human player.