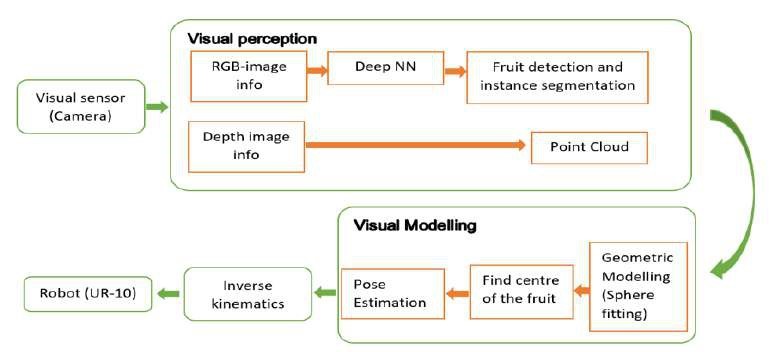
Fruit Plucking Robot Architecture
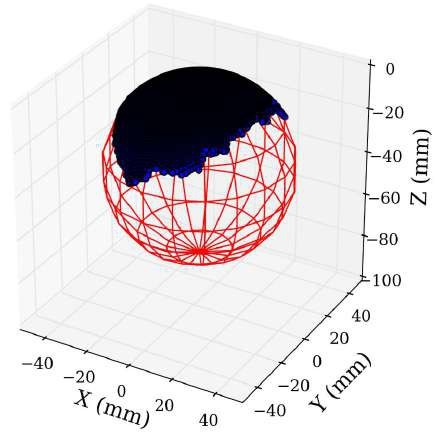
Sphere Fitting For Apple Modelling
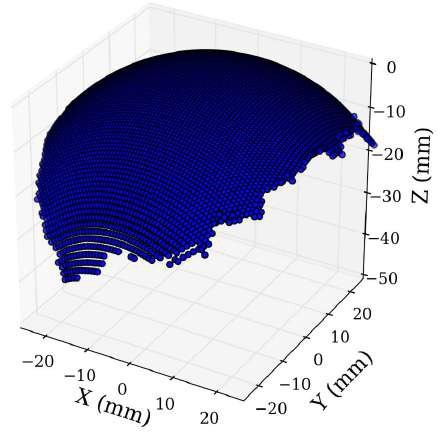
Point Cloud
Sphere Fitting
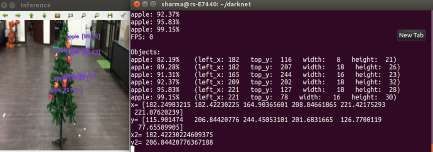
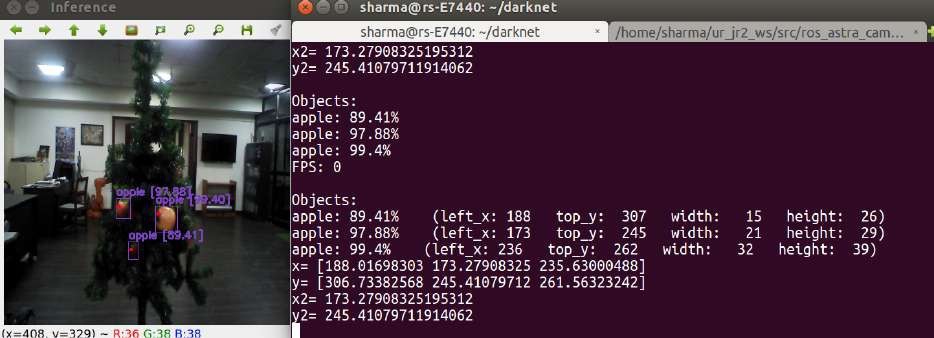
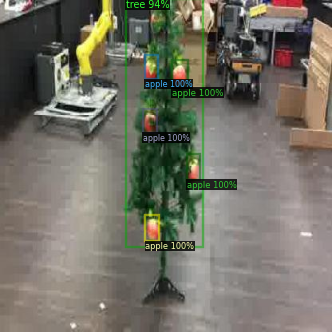
Deep Learning Detection Results
Sample Images In The Collected Dataset


Mask R-CNN Results On Our Dataset
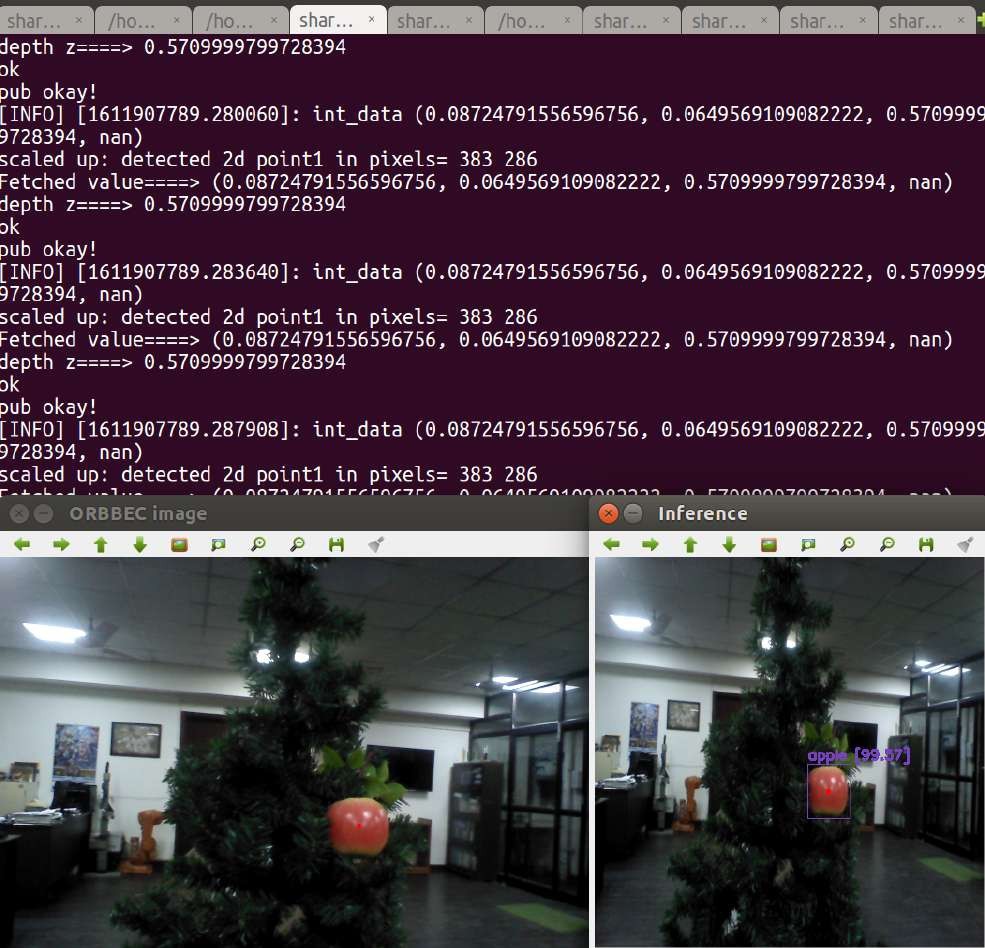
Raw Image

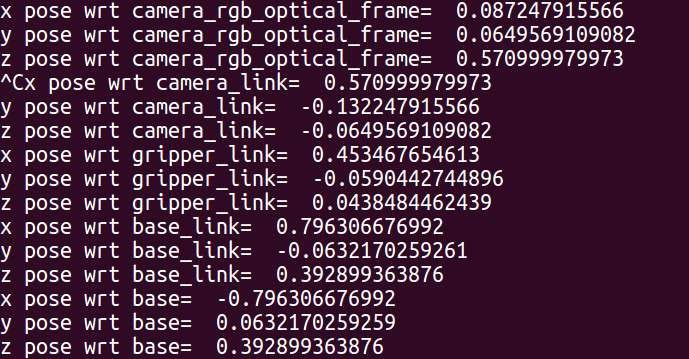
Tree and Fruit Localization

Faster R-CNN results On Our Dataset
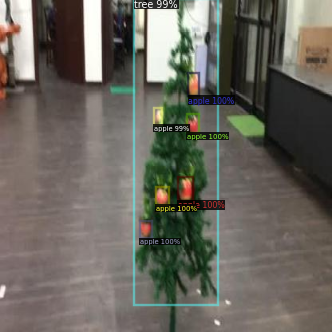
YOLO V-5 Results On Our Dataset