Autonomous Valet Parking
RBE550-Valet implements state lattice-based motion planning with A* search to navigate three distinct vehicle types through a constrained parking environment with obstacles, developed as part of the RBE550 Motion Planning course at Worcester Polytechnic Institute. Each vehicle type operates under unique kinematic constraints reflecting real-world drive mechanics.
Vehicle Types
Differential Drive (Skid Steer)

Ackermann Steering

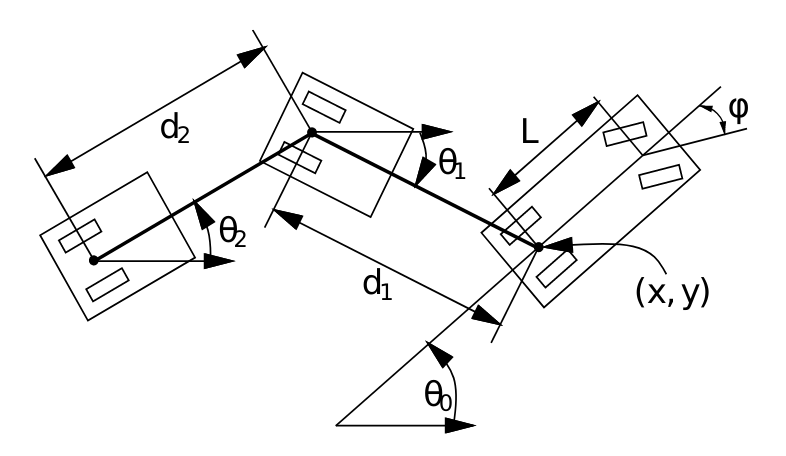
Truck + Trailer

Planning Approach
State Lattice — A structured graph of pre-computed motion primitives is constructed that respects each vehicle’s kinematic constraints. Feasible maneuvers (forward, reverse, turning) are encoded as edges between discrete states.
A* Search — The lattice is searched using A* with a Euclidean distance heuristic. The planner finds the minimum-cost path from start (50, 50) to goal (350, 500) while avoiding rectangular obstacles.
Collision Detection — At each expansion step, candidate configurations are checked for intersection with environment obstacles before being added to the search frontier.
| Vehicle | Constraint | Degrees of Freedom |
|---|---|---|
| Differential Drive | Independent wheel speeds | Translation + rotation |
| Ackermann | Fixed turning radius (steering angle) | Non-holonomic, car-like |
| Truck + Trailer | Trailer angle coupling constraint | 3-DOF (truck + trailer angle) |