Mars Rover Prototype
This project is a Mars rover prototype built for field robotics competitions. It features a six-wheel rover base, a multi-DOF robotic arm, onboard perception, and ROS-based autonomous navigation and teleoperation.
The rover was developed, tested on campus, and later deployed at IRC 2020, where it performed a range of tasks including extreme retrieval, equipment servicing, and science sampling.

Simulation
On-Campus Testing
Robotic arm testing
Motor testing
Autonomous navigation testing
Outdoor terrain testing
IRC 2020
Extreme retrieval task
Equipment servicing task
Science task
Results
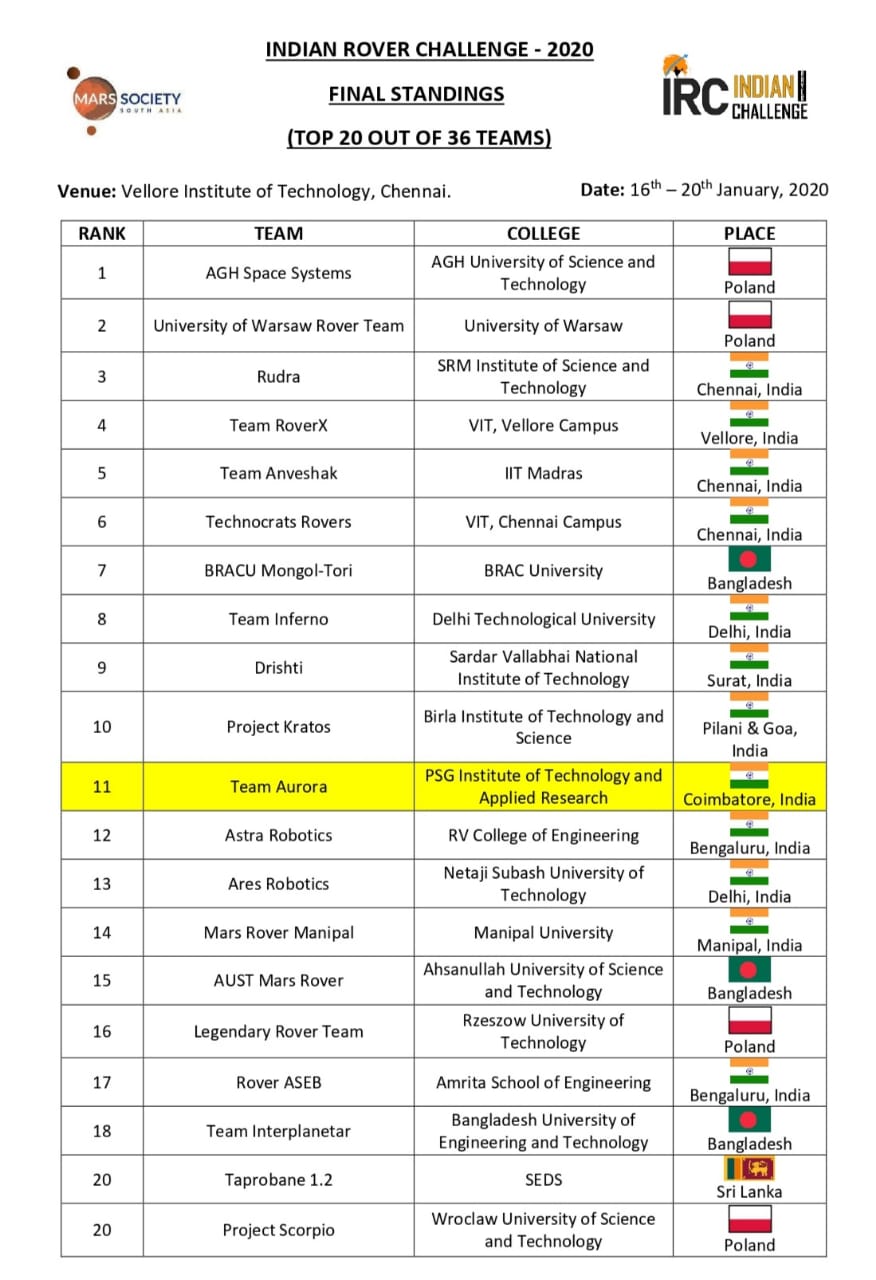
Team
