Autonomous Fruit Harvesting Robot
This project is an autonomous fruit harvesting robot developed as a collaborative research project between IIT Kanpur and IIT Palakkad. The system uses a mobile platform with a robotic arm and a vision pipeline based on detection, segmentation, and 3D pose estimation to locate and pick fruits. The stack was implemented in Python and ROS, with simulation in Gazebo and PyBullet.
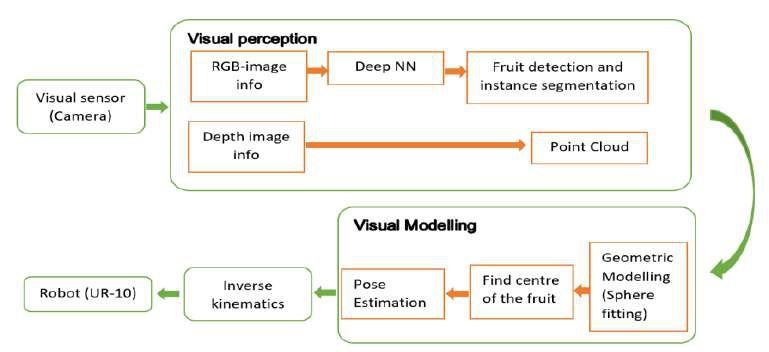
Fruit Plucking Robot Architecture
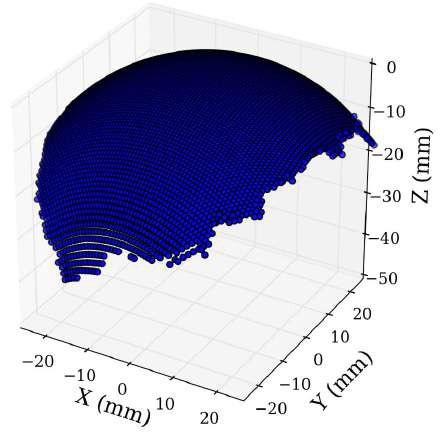
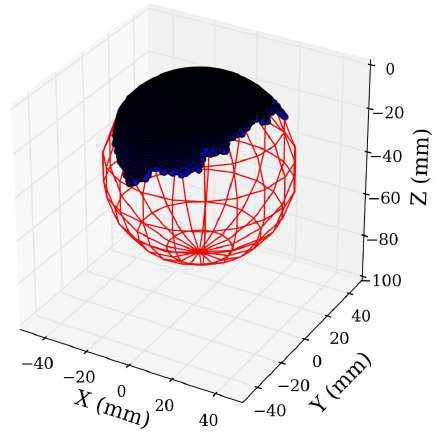
Sphere Fitting For Apple Modelling
Point Cloud
Sphere Fitting
Deep Learning Detection Results
Sample Images In The Collected Dataset


Mask R-CNN Results On Our Dataset
Raw Image

Tree and Fruit Localization

Faster R-CNN Results On Our Dataset
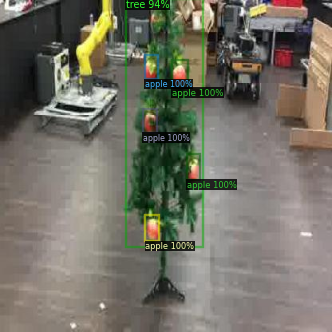

YOLO V-5 Results On Our Dataset


Fruit Plucking Experiment
Point Cloud Simulation of Apple tree for Robot Harvesting
Home Position

Input Image

Fruit Localization

Fruit Plucking

Robot Holding Apple

Drop Localization

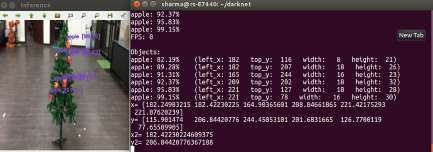
Real Time Results
Test Result Using Captured Image
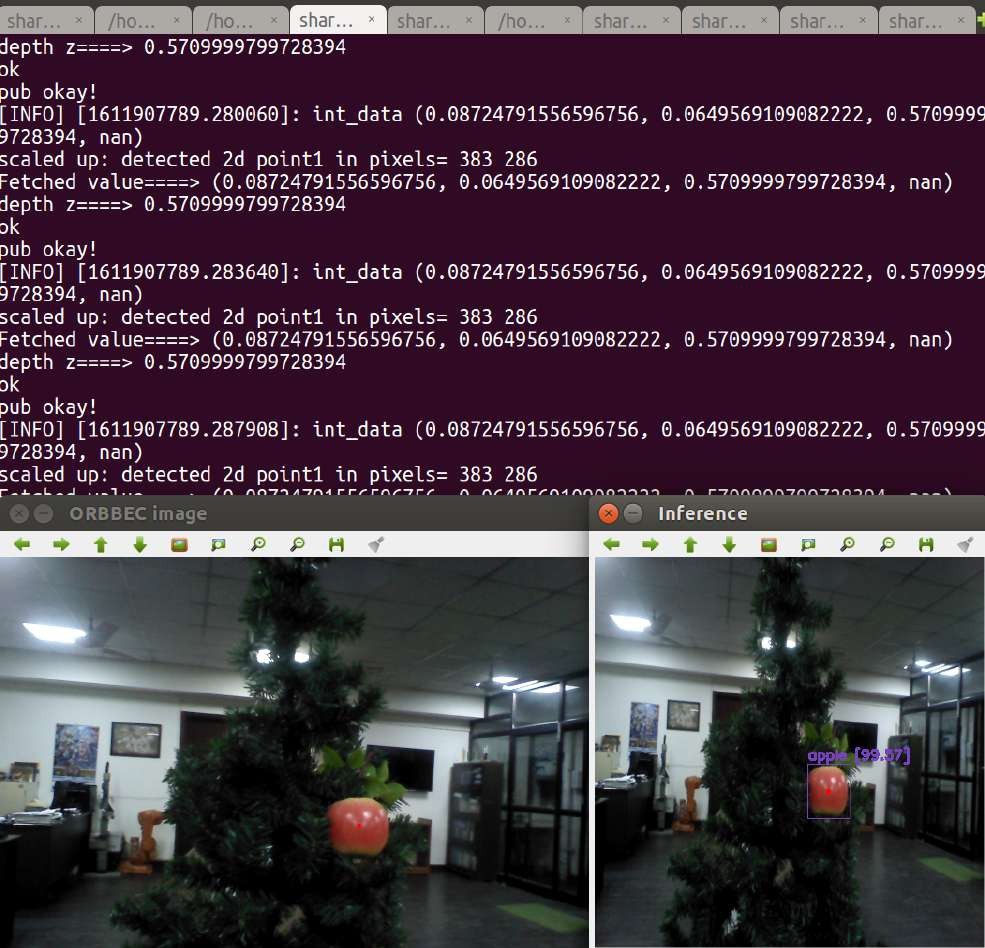
Real Time Result Using ORBBEC Camera
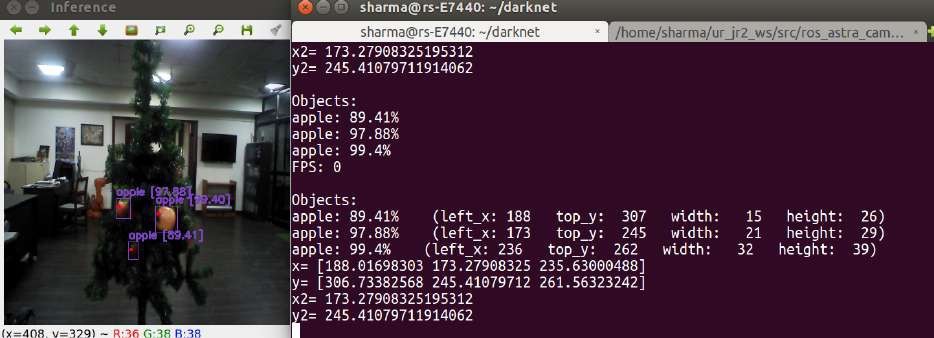
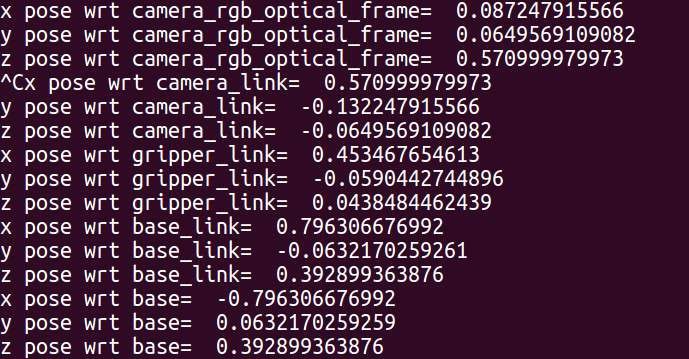
2D Detected Point And Its Respective 3D Points In Different Frames
False Detection Scenario

Test Result