Goal-Driven Navigation via Deep Reinforcement Learning
This project trains a mobile robot to autonomously navigate toward randomly placed goals while avoiding obstacles, using the TD3 (Twin Delayed Deep Deterministic Policy Gradient) algorithm. The system runs in ROS Noetic + Gazebo 11, with a Velodyne 3D LiDAR and RGB camera as sensor inputs, outputting continuous linear and angular velocity commands.
Training Demo
Simulation Environment & Sensors
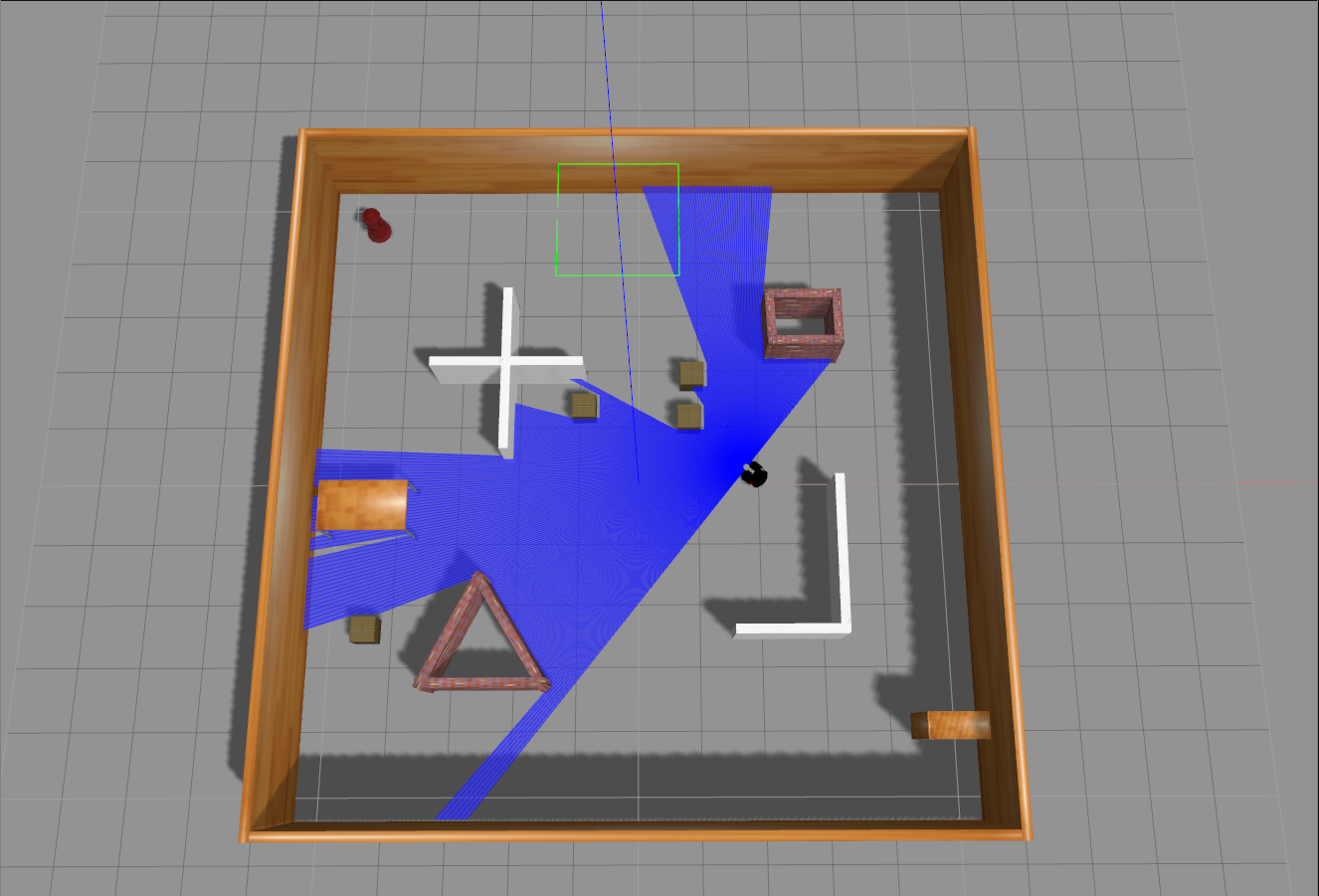
Gazebo Environment
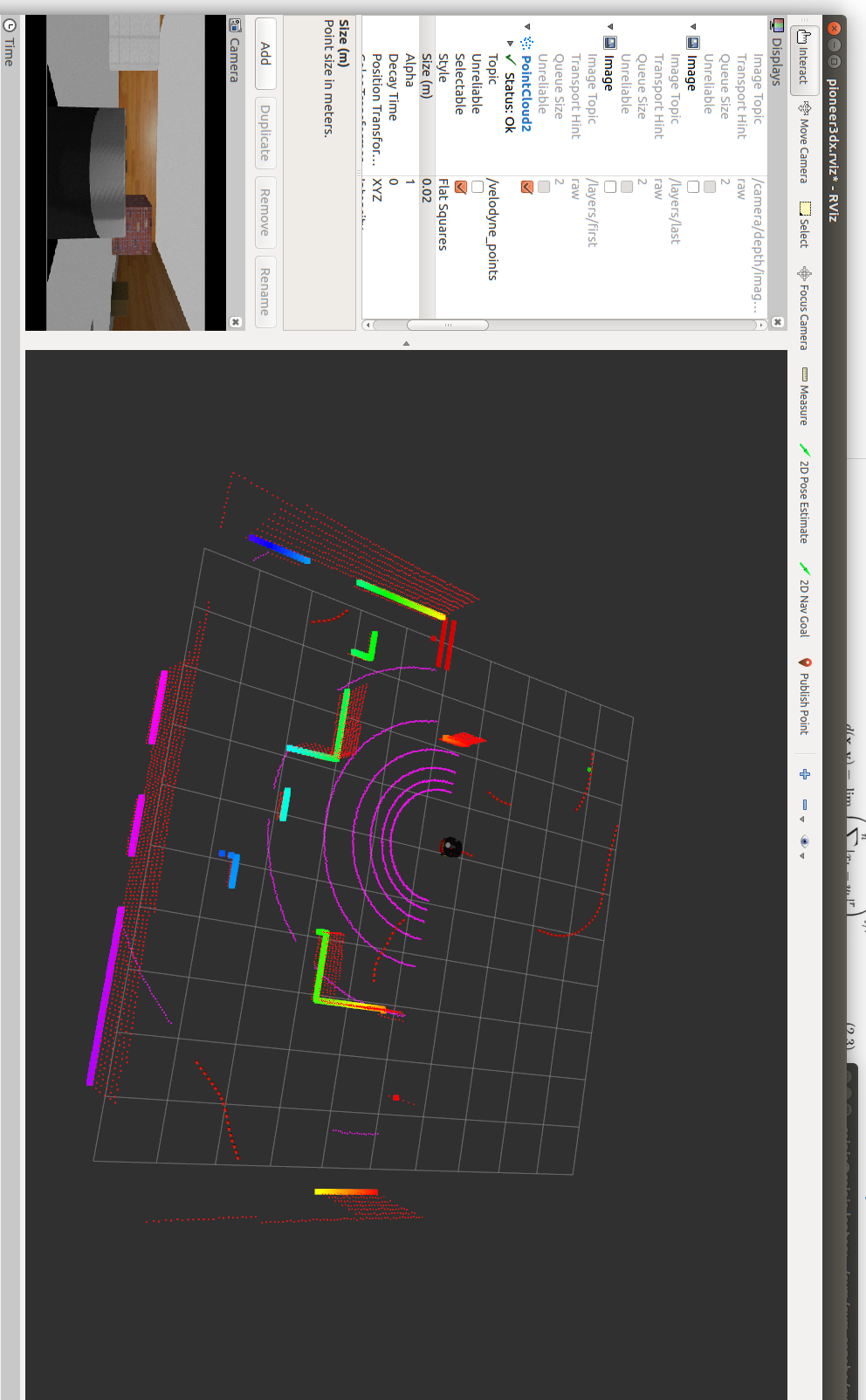
Velodyne LiDAR (RViz)
Algorithm: TD3
Twin Delayed Deep Deterministic Policy Gradient (TD3) addresses the overestimation bias of standard actor-critic methods through three key modifications:
1. Clipped Double Q-Learning — Two independent critic networks estimate the Q-value; the minimum is used for the TD target, reducing overestimation.
2. Delayed Policy Updates — The actor and target networks update less frequently than the critics (every 2 critic updates), allowing the value estimates to stabilize before the policy changes.
3. Target Policy Smoothing — Noise is added to the target action during critic updates, smoothing the value function and reducing exploitation of sharp Q-function peaks.
System Architecture
| Component | Details |
|---|---|
| Simulation | Gazebo 11, ROS Noetic |
| Sensors | Velodyne 3D LiDAR, RGB camera |
| Action space | Continuous linear + angular velocity |
| State space | LiDAR scan + goal direction + distance |
| RL Algorithm | TD3 (actor-critic) |
| Deep learning | PyTorch 1.10+ |
| Training monitor | TensorBoard |
The actor network outputs deterministic velocity commands given the current sensor state. The dual critic networks estimate the expected cumulative reward, providing a stable learning signal via the Bellman equation.