Pb-Lite Edge Detection
Pb-Lite is a simplified implementation of probability-based boundary detection, developed as part of the RBE549 Computer Vision course at Worcester Polytechnic Institute. Rather than relying solely on intensity discontinuities, the system incorporates texture, brightness, and color gradient information across multiple scales to produce sharper, more semantically meaningful edge maps.
Filter Banks
Three families of filters are convolved with the input image to extract multi-scale texture responses.
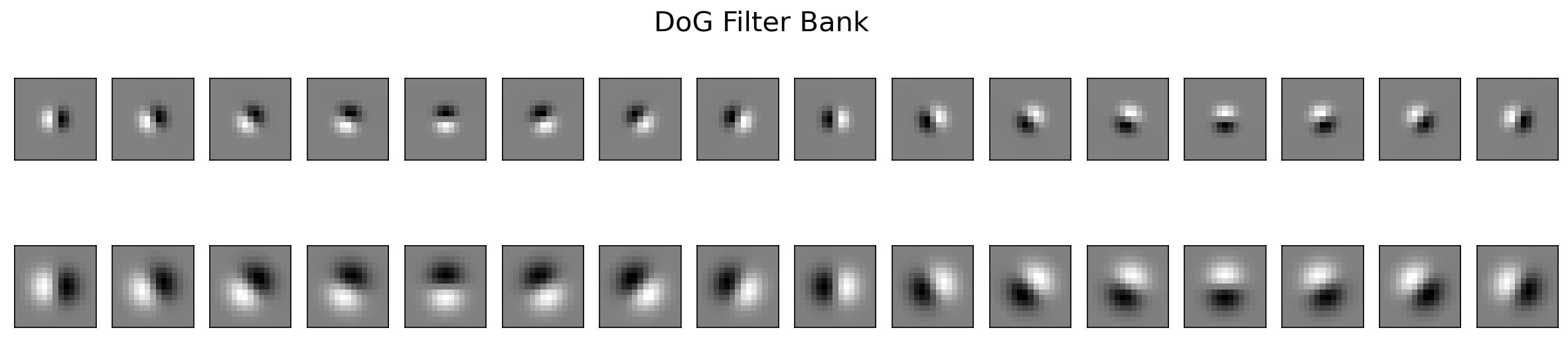
Derivative of Gaussian (DoG)
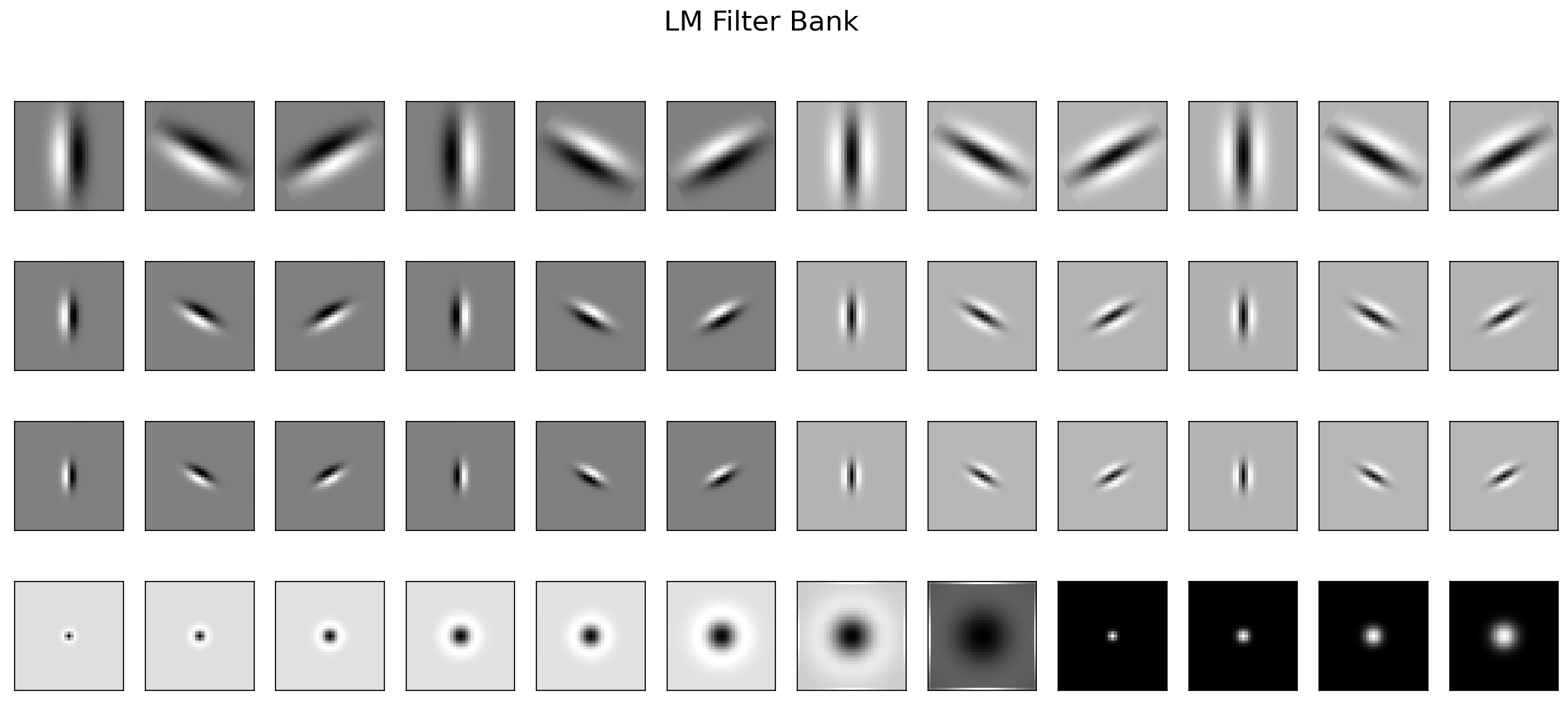
Leung-Malik (LM) Filters
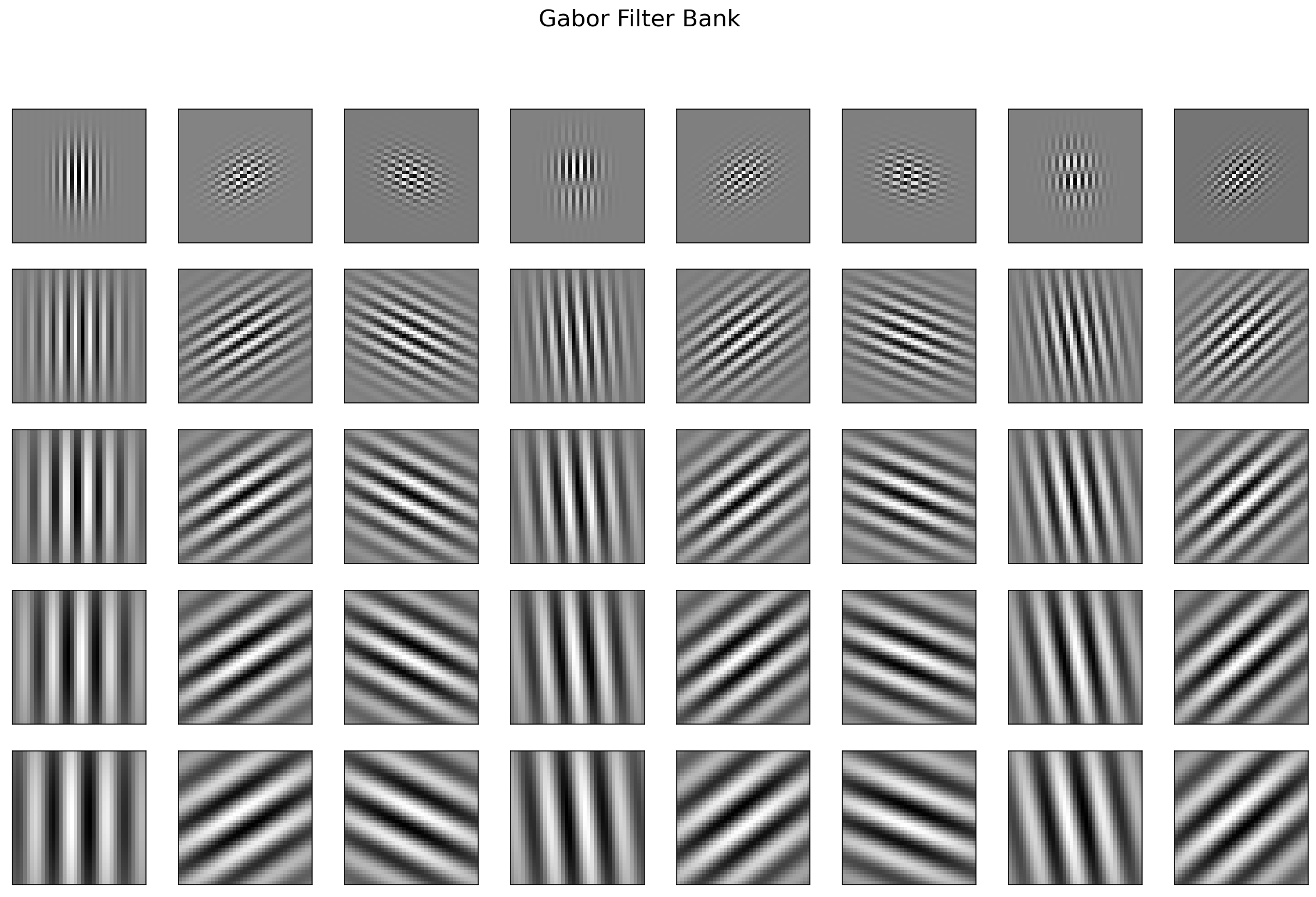
Gabor Filters
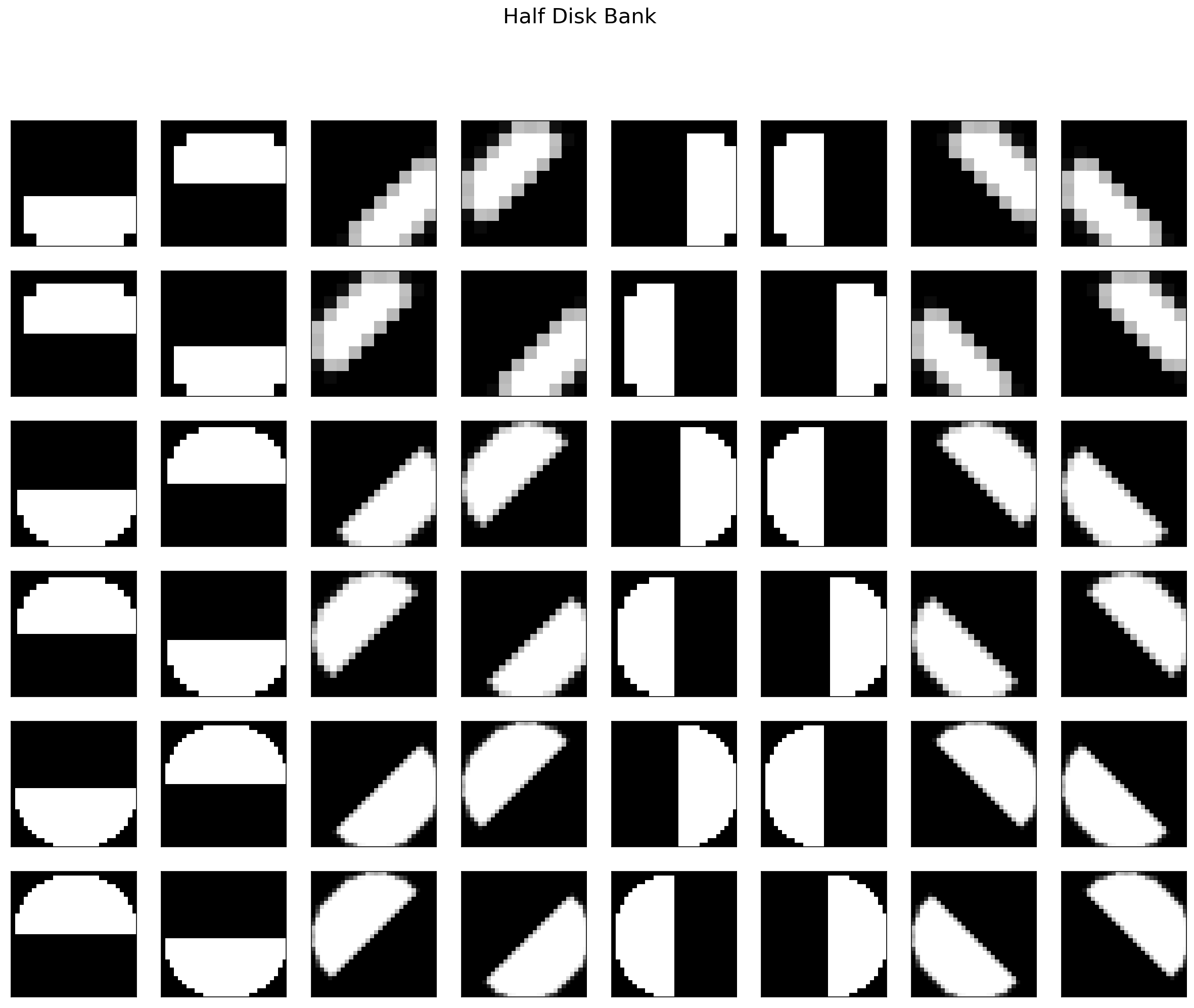
Half-Disc (HD) Masks
Pipeline: Sample Results (Image 1)
Original

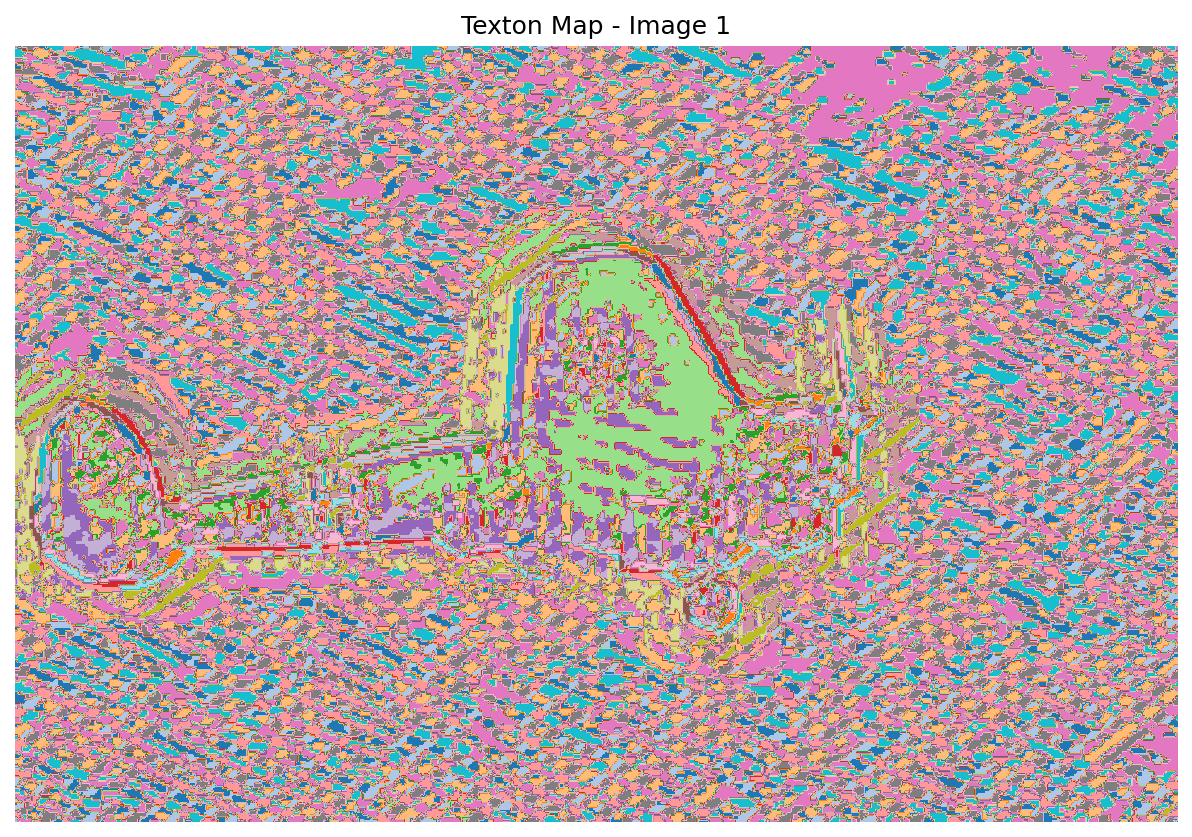
Texton Map
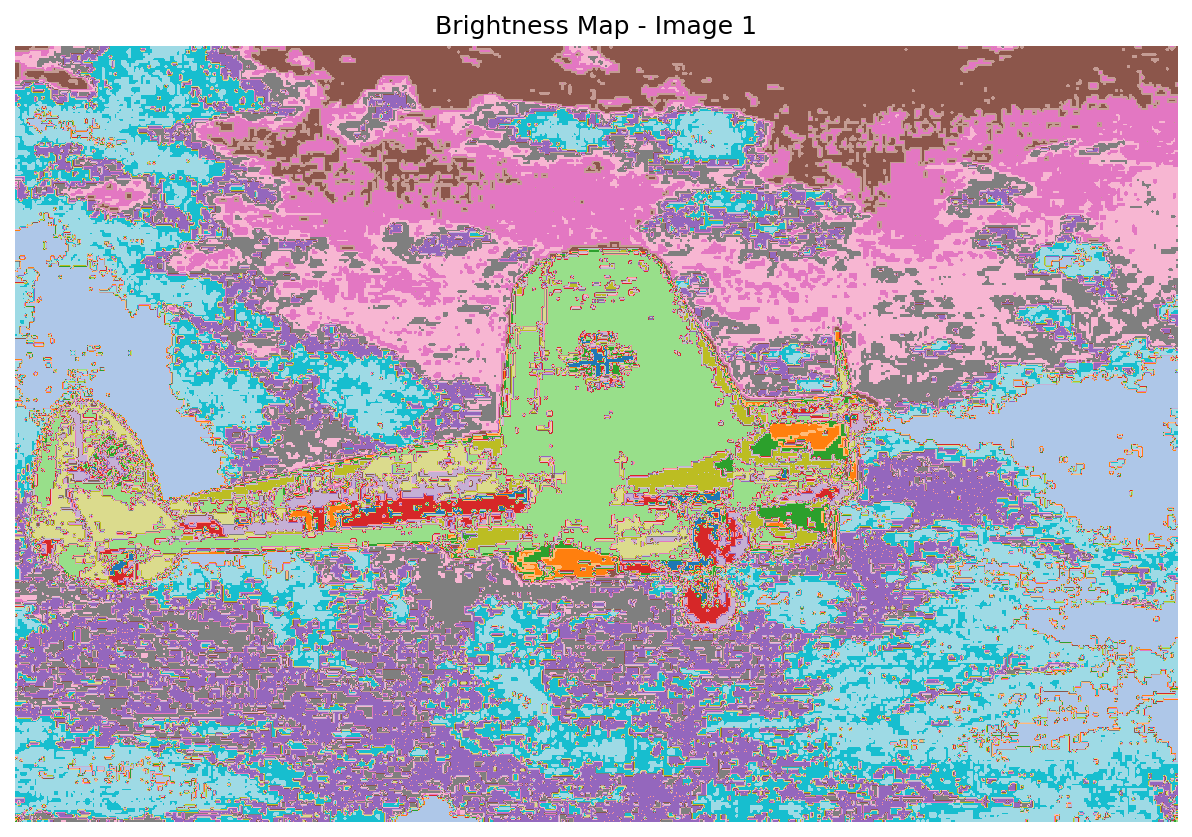
Brightness Map
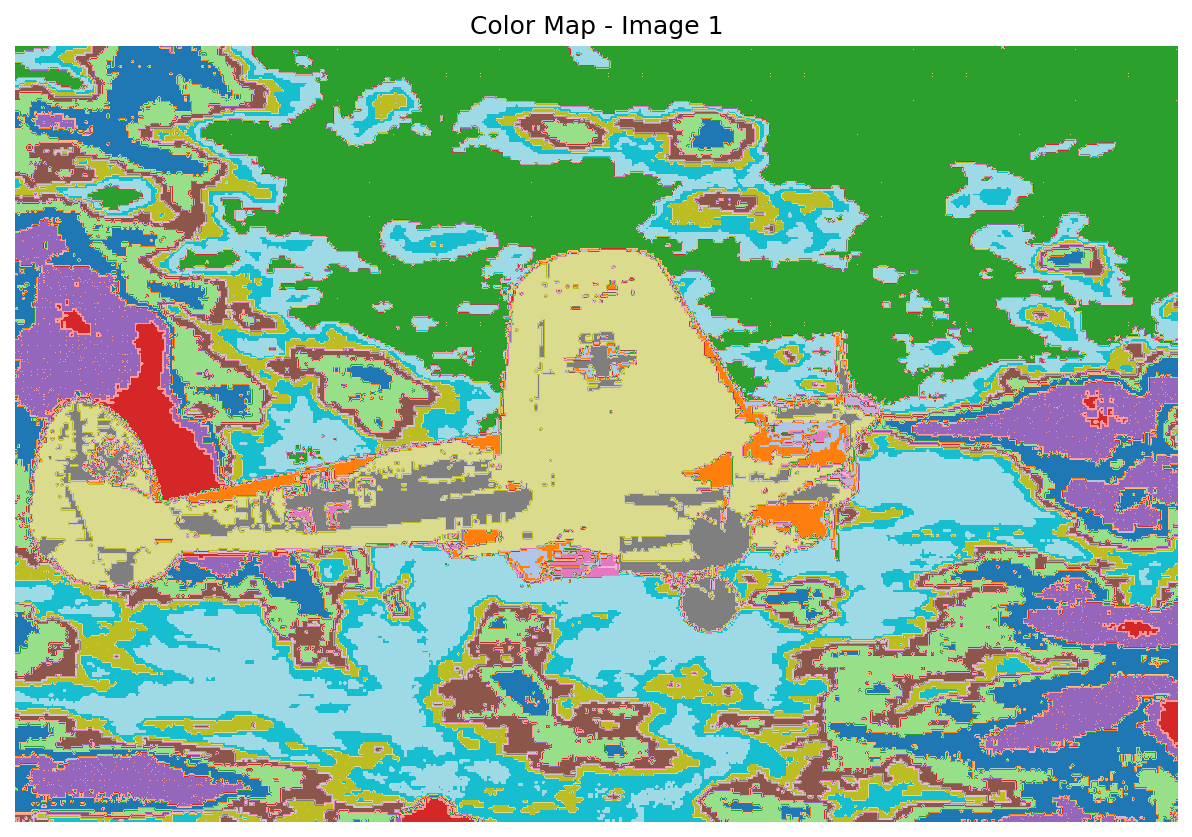
Color Map
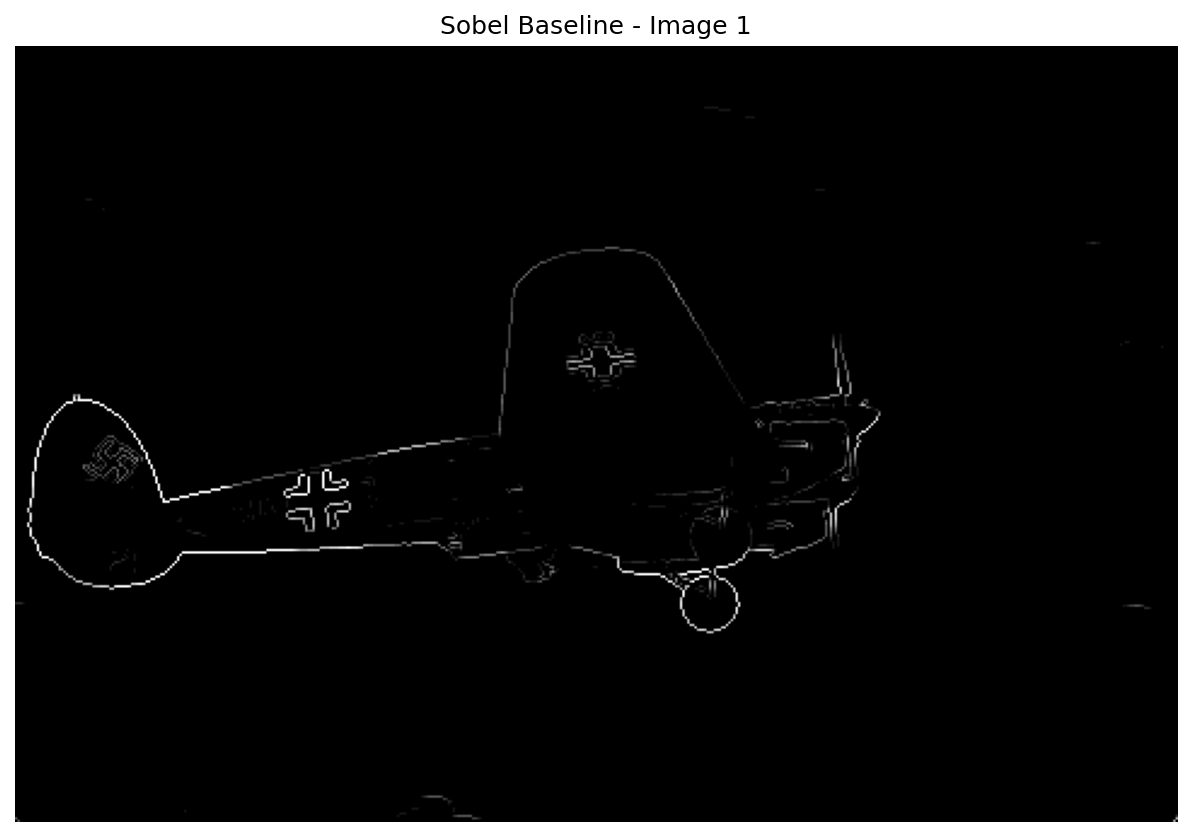
Sobel Baseline
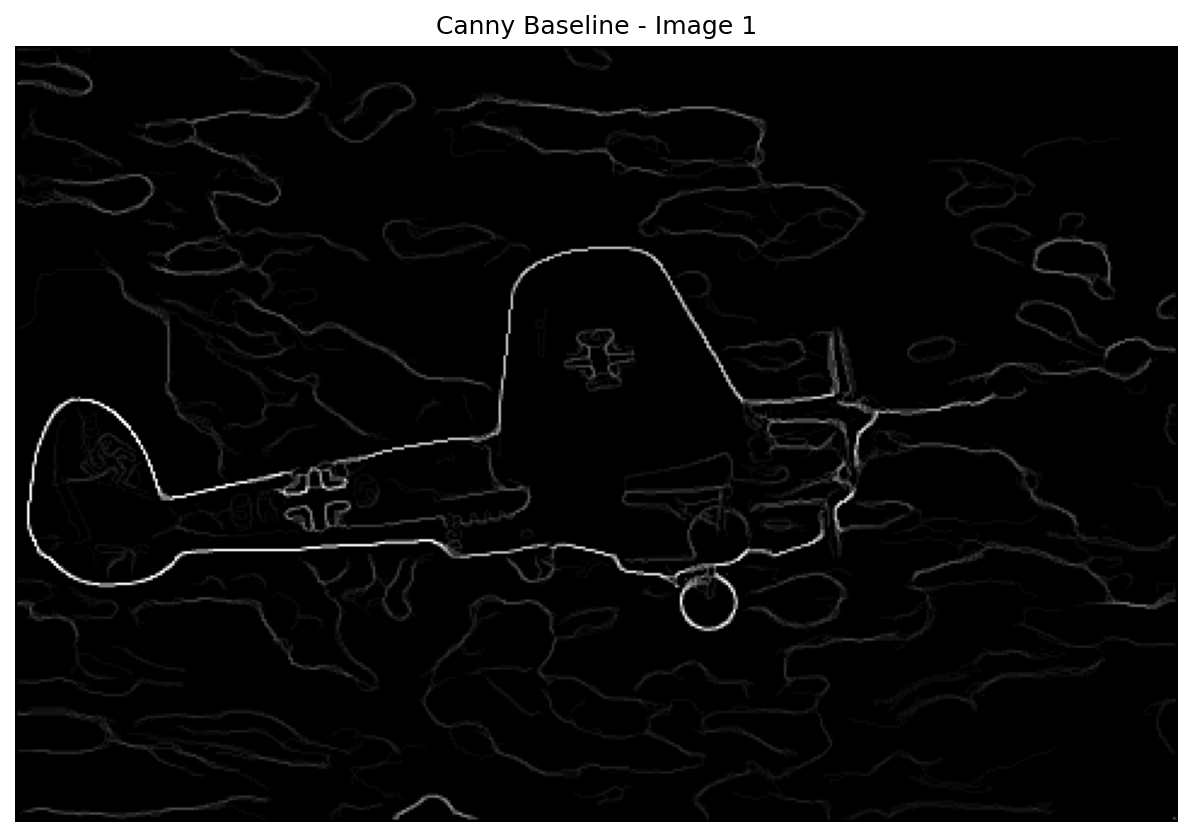
Canny Baseline
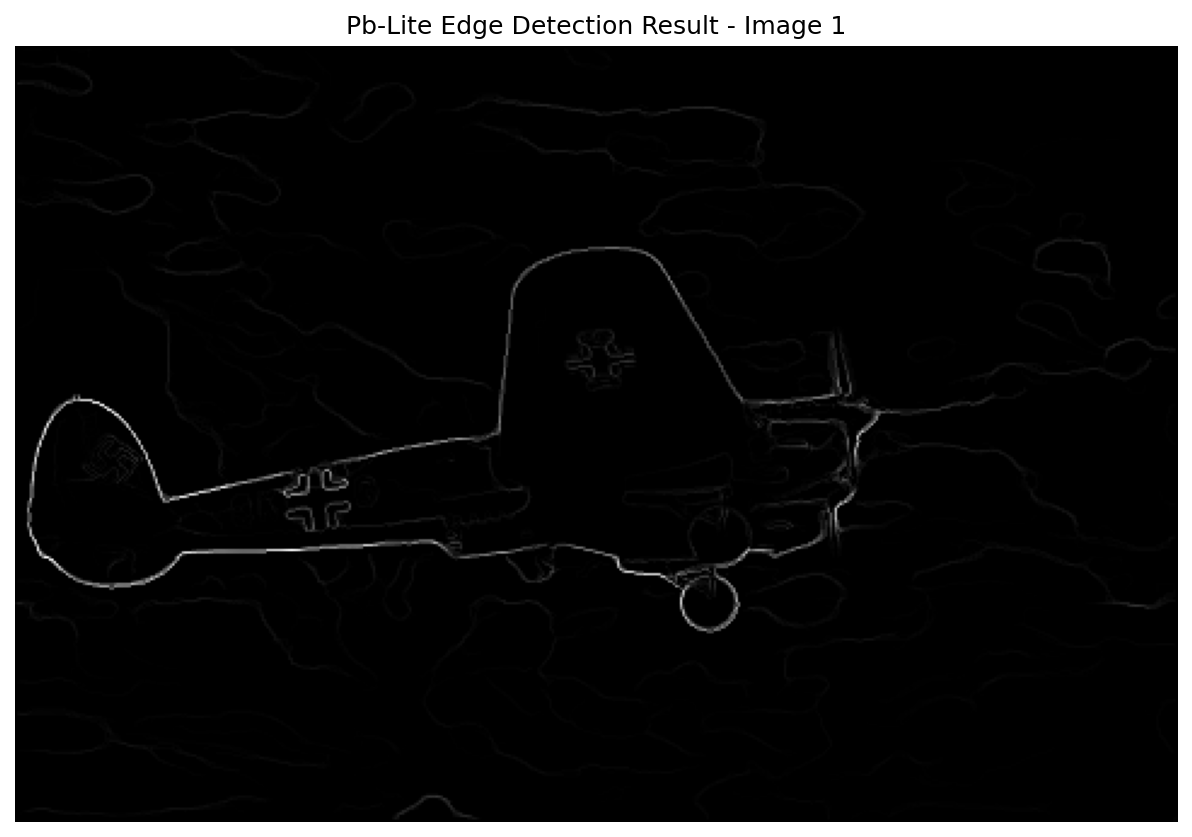
Pb-Lite Output
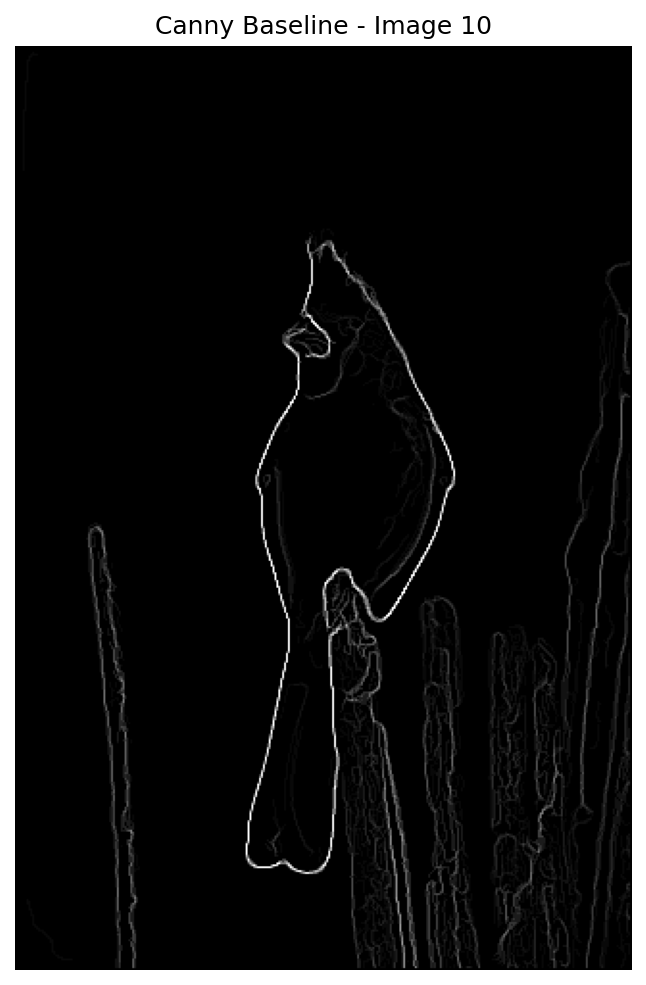
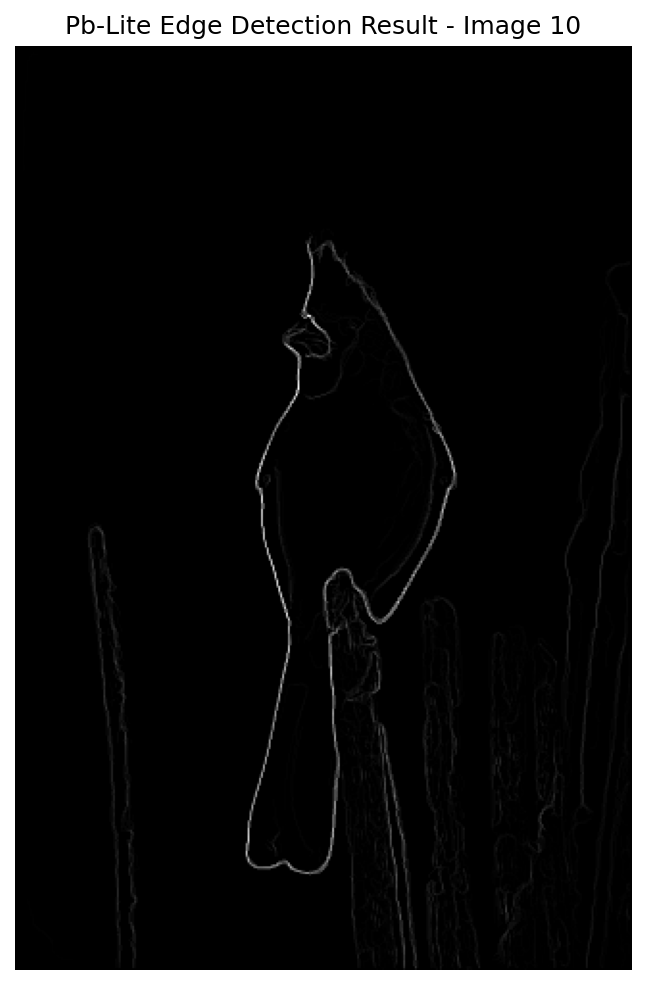
Pipeline: Sample Results (Image 10)
Original

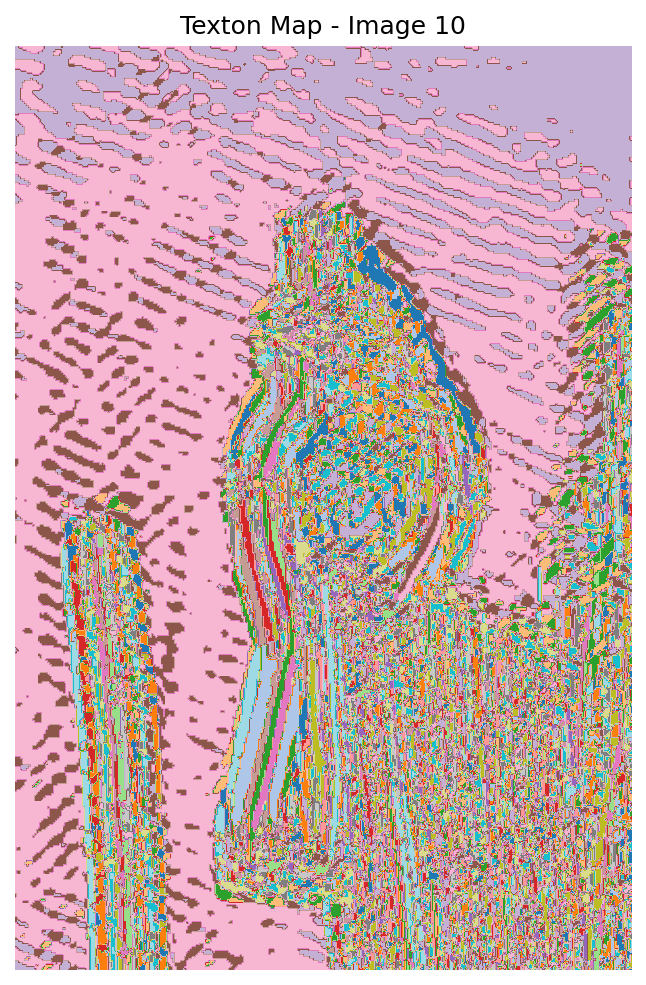
Texton Map
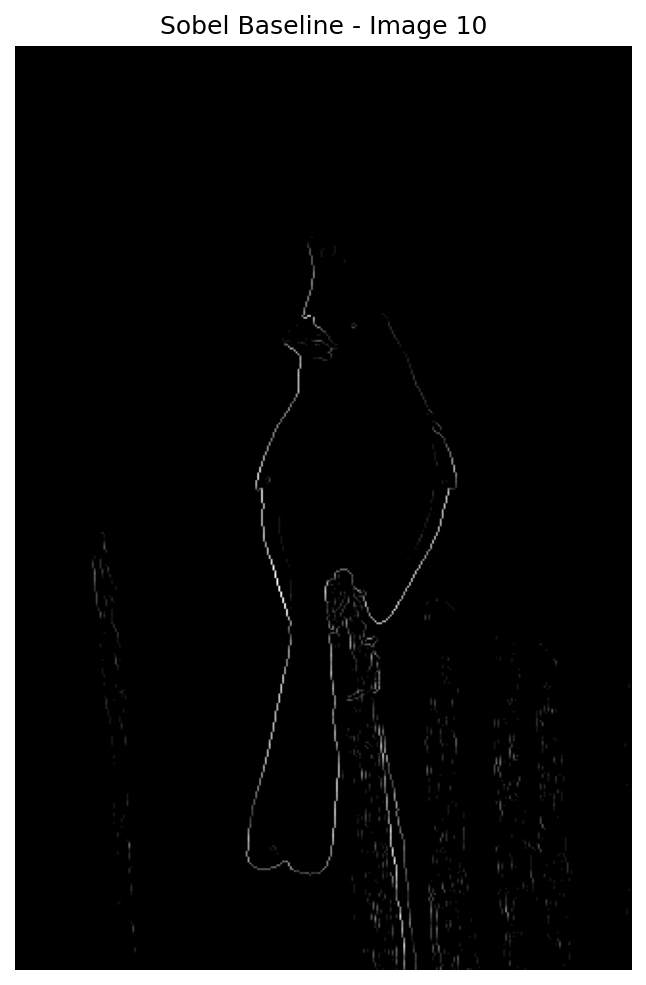
Sobel Baseline
Canny Baseline
Pb-Lite Output
How It Works
1. Filter Bank Responses — The input image is convolved with DoG, LM, and Gabor filter banks to generate multi-scale, multi-orientation texture responses.
2. Texton Map — K-means clustering (K=64) on filter responses assigns each pixel a texton label, capturing local texture structure.
3. Brightness & Color Maps — K-means (K=16) on grayscale intensity and RGB color channels produces compact brightness and color cluster maps.
4. Gradient Computation — Half-disc masks at multiple scales compute chi-squared distances between cluster histograms on opposite sides of each pixel, yielding texture gradient (Tg), brightness gradient (Bg), and color gradient (Cg).
5. Pb-Lite Combination — The gradients are combined with Sobel and Canny baselines via weighted averaging to produce the final probabilistic boundary map.